TODAY: Gaussian Process Regression - I¶
- Historical background: kriging
- Multivariate correlation
References¶
- GPML Chps. 1, 2, 4
- DACE Toolbox Manual
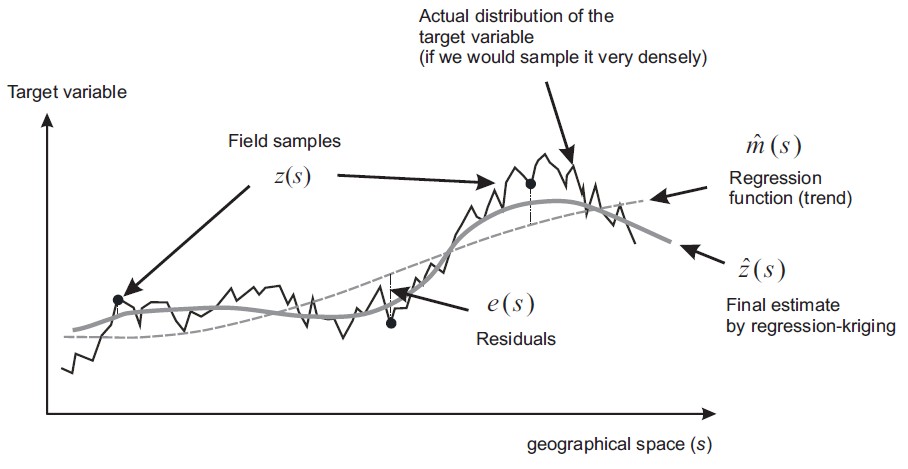
"Kriging" model by Danie G. Krige¶
Danie Gerhardus Krige (26 August 1919 – 3 March 2013), South African statistician and mining engineer who pioneered the field of geostatistics. Inventor of kriging.

$$
y=\underbrace{f(x)}_{Trend}+\underbrace{e(x)}_{Noise}
$$
- Capture the global trend of a dataset, such that the error behaves like white noise.
- But now the noise is location-depedent.
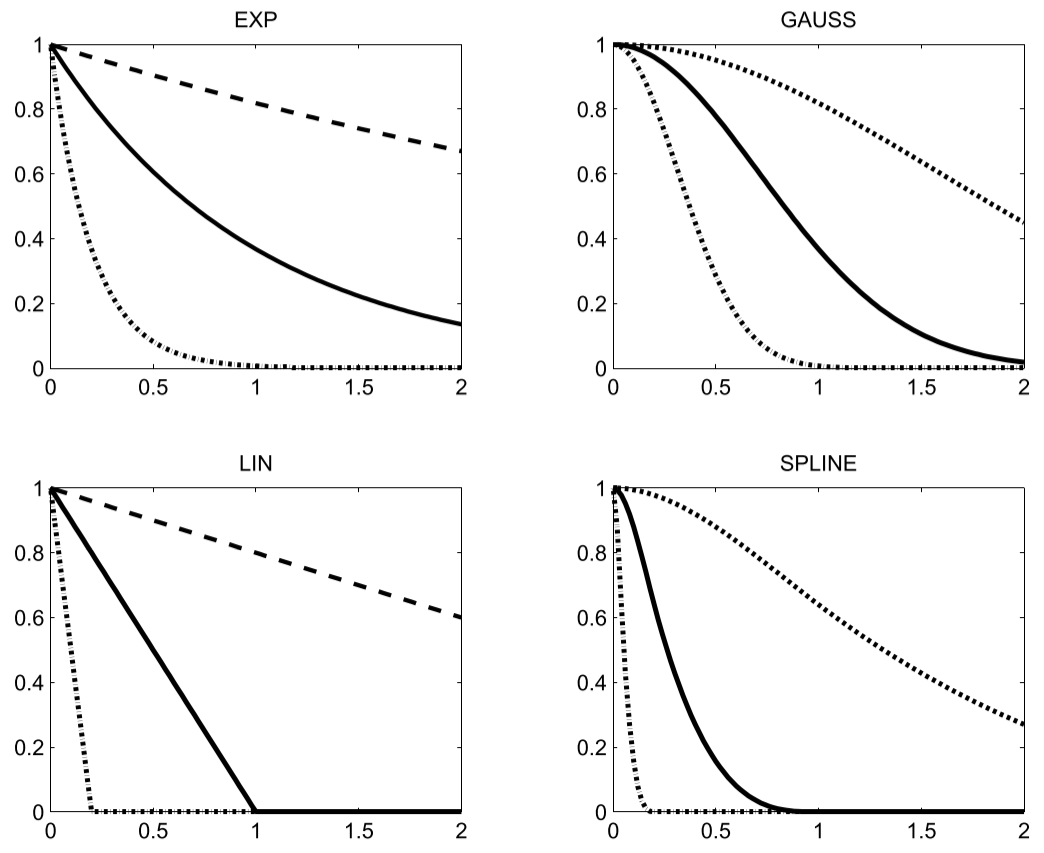
Correlation and Covariance¶
Covariance function¶
In [3]:
# Spatial correlation between Gaussian samples at different locations
a = [0.0, 0.0]
x, RV, KS = genGP(5, # Number of sampling points
0.05, # Length scale in a SE correlation term
a, # Coefficients of second-order polynomial
1000) # Number of GP realizations
plt.figure()
plt.imshow(KS)
plt.colorbar()
_=pltCorr(x, RV)
_=pltGP(x, RV, a,
bnd=True, # Plot error bounds
smp=True)



In [4]:
# Realizations over a set of sampling points
a = [10.0, 0.0]
x, RV, _ = genGP(200, # Number of sampling points
0.0025, # Length scale in a SE correlation term
a, # Coefficients of second-order polynomial
1000) # Number of GP realizations
_=pltGP(x, RV, a,
bnd=True, # Plot error bounds
smp=True) # Highlight three samples and plot the mean
